Finite-Time Distributed Frequency Regulation for Islanded AC Microgrids
PhD student Stanton Cady with advisor A. Domínguez-García
This work develops and implements a distributed control architecture for regulating frequency in islanded ac microgrids. By combining computations performed by local generator controllers with information received from those of nearby generators, functionality that typically requires a centralized computer connected to each generator by a communication network can be replicated distributively. An iterative algorithm is executed over several rounds; through this repetition, the frequency error that results following, for example, a load change, can be eliminated. While many distributed iterative algorithms have asymptotic convergence, i.e., the true solution is obtained after an infinite number of iterations, our approach executes in finite time (Figure 21). Although the solution is not exact, it can be made arbitrarily small by adjusting the desired frequency level at each round. Additionally, our distributed approach uses an event-triggered protocol to determine when control action should be taken; together with the finite-time algorithm, this approach can result in reduced control effort in periods when the system is not perturbed or the perturbations are small.
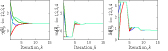
Figure 21: Evolution of finite-time algorithm states for a 4-bus system
A 6-bus laboratory-grade microgrid was created to demonstrate the efficacy of our distributed control architecture. An Arduino microcontroller outfitted with an XBee wireless transceiver which acts as the local controller is connected to each generator’s prime mover. Following a change in load, one of the local generator controllers measures the frequency error and determines the amount of torque to be added or removed from the system in order to return the frequency to the desired value. Once computed, the local controllers begin executing the distributed algorithm which serves to disperse the torque error among all of the generators in the system. Figure 22 illustrates the torque supplied by each generator in the system as well as the frequency as measured by the generators following a load increase. As shown, the control architecture effectively returns the frequency to the desired value of roughly 1200 RPM (the equivalent of 60 Hz). This work is funded by the National Science Foundation (NSF) under grant ECCS-CPS-1135598.

Figure 22: Generator torque and system speed following a load increase