Controller Hardware-in-the-Loop Testing of Microgrid Secondary-Frequency Control Schemes
Siddhartha Nigam with advisers P. Sauer and A. Domínguez-García
In this work we describe a controller hardware-in-the loop (C-HIL) approach for testing centralized and distributed secondary frequency control schemes of ac microgrids operating in islanded mode. Several coordination and control schemes for microgrid secondary frequency control have been proposed. They have primarily utilized centralized and decentralized decision-making approaches, which have several limitations. For example, the centralized decision-making approach is susceptible to a single point of failure, while the decentralized decision-making approach typically lacks the flexibility necessary for a seamless integration of additional resources. An alternative, the distributed decision-making approach, has gained some popularity among researchers in the last decade. In theory, coordination and control schemes based on the distributed decision-making approach should overcome the limitations of its other counterparts. However, to the best of our knowledge, there is no study that quantifies and compares the performance of microgrid controls based on the distributed decision-making approach with those based on centralized or decentralized decision-making approaches, especially in the context of performing secondary frequency control. Hence, there is a need to test, validate, and compare the performance of these schemes, so as to understand which one is best suited for microgrid frequency control.
We now present the test-bed utilized for C-HIL testing activities. The setup for testing the centralized control scheme comprises a National Instruments (NI) compact rio (cRIO) device, a centralized entity, that carries out secondary frequency control of an islanded ac microgrid whose components, i.e., the electrical network and its connected DERs and loads, are simulated using a Typhoon HIL real-time. The setup for testing the distributed control scheme comprises the same emulated microgrid, but instead of using the NI cRIO device for centralized monitoring and control, several interconnected Arduino devices are used to implement our distributed algorithms for microgrid secondary frequency control. Each Arduino device utilizes the information acquired, e.g., from measurements and other information obtained through exchanges with other nearby Arduino devices, to perform successive computations and adjust the set-points of each controllable entity in the emulated microgrid, so as to achieve the secondary frequency control objective. The C-HIL testing setup for both the centralized as well distributed implementation is shown in Figures 4 and 5, respectively.
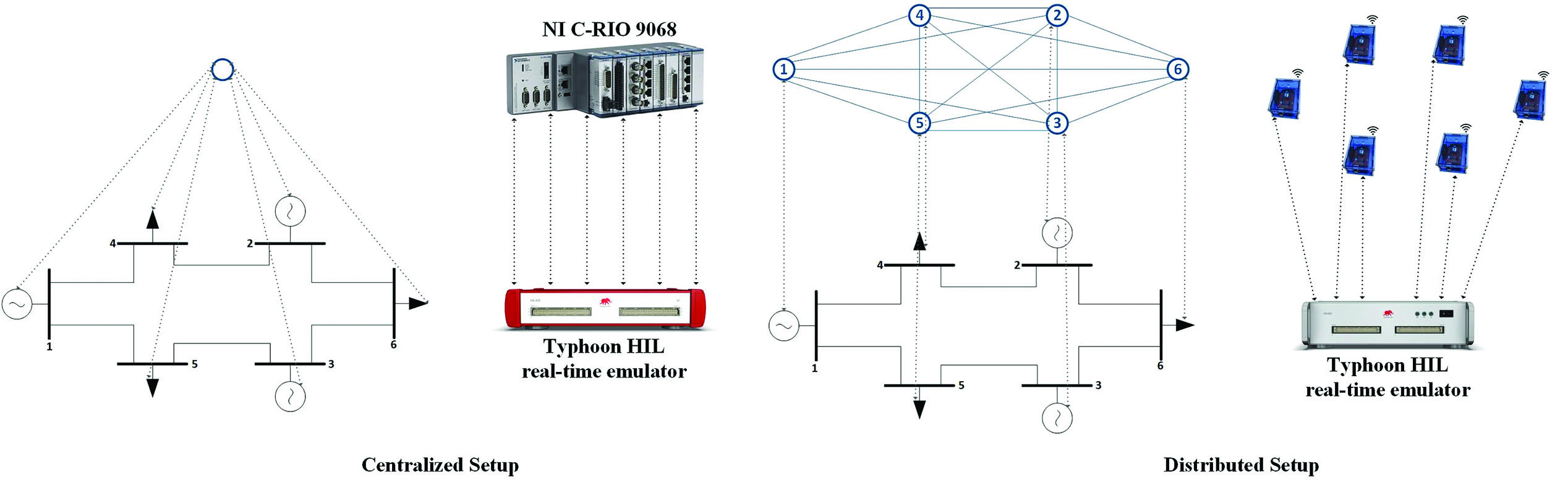
Figure 4: 1C-HIL Test setup for centralized and distributed control scheme

Figure 5: Frequency response during implementation of both control schemes under resilience test
Finally, we give testing results to compare the performance (in terms of the system response time), and resilience (in terms of withstanding the failure of a control device), of both schemes. We ran a 150-second long C-HIL real-time simulation with the following perturbations to the system:
1) At the 30-second mark, the load `6 changes to 1:4 pu from 0:9 pu.
2) At the 60-second mark, the microgrid loses DER connected at bus 1 from the network.
3) At the 80-second mark, we remove the centralized controller and a distributed node to mimic a failure.
4) At the 100-second mark, we eliminate another distributed node to mimic a failure.
5) At the 120-second mark the microgrid loses load connected at bus 6.
The results obtained from the C-HIL simulation for both schemes are shown in Figure 5. Up until the 80-second mark, the centralized scheme outperforms the distributed one in terms of the response time for frequency control objective. But, post the 80-second mark, the distributed scheme can ride through the failures and still fix the frequency error. Hence, the distributed scheme is more resilient to node failures. This research is supported by Grainger Fellowships.