An Industrial Grade Control-Node Prototype that Integrates Distributed Control Algorithms
Post-doc Olaoluwapo Ajala with advisor A. Domínguez-García
During the last decade, we developed numerous control algorithms for microgrid applications that rely on a distributed decision-making approach wherein control decisions pertaining to individual assets in the microgrid are based on information acquired locally and other information obtained by exchanges with nearby assets. We showed that the distributed decision-making approach has the potential for realizing, in a scalable fashion, all the control functions necessary for stable, reliable, and resilient microgrid operation. The objectives of the next research phase are:
1. To integrate into a hardware platform the distributed control algorithm
for which we have established solid theoretical foundations.
2. To demonstrate the effectiveness of this platform and the companion
algorithms in performing standard microgrid control functions, as de-
fined in IEEE1547, IEEE2030.7, and IEEE2030.8.
3. To demonstrate the effectiveness of this platform for networking mul- tiple microgrids, and integrating additional critical loads, generation,
and storage assets into an existing microgrid.
Instead of having a centrally located computing device implementing all control functions, our solution is distributed, i.e., a microgrid is endowed with multiple, geographically dispersed, computing devices referred to as control nodes. The control nodes use the information they acquire locally, e.g., from measurements, and via exchanges with nearby control nodes as inputs, to a suite of distributed algorithms implementing different control functions (both for grid-connected and islanded operation), e.g., primary and secondary frequency control, voltage control, and optimal generation-asset dispatch, as well as handling transitions from grid-connected to islanded operation and vice versa. The deliverable is an industrial-grade control-node prototype that integrates the aforementioned distributed control algorithms. By using controller hardware in the loop (C-HIL) testing and quantitative reliability analysis (see Figure 1), we will demonstrate that employing a collection of such devices to control microgrid assets provides a robust and resilient plug-and-play control platform. We will also demonstrate that this platform provides a cost-effective solution for promoting a seamless interconnection and interoperability of multiple microgrids.
This research is supported by the US DoD’s environmental technology demonstration and validation program.
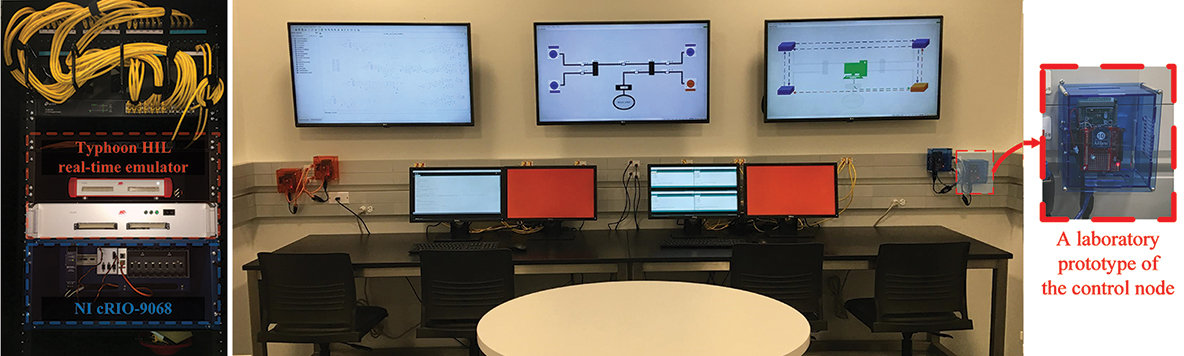
Figure 1. U of I C-HIL testbed for microgrid control development and testing