Robust Adaptive Control of Induction Motors Using the L1 Control Scheme
Paul Rancuret with adviser P. T. Krein
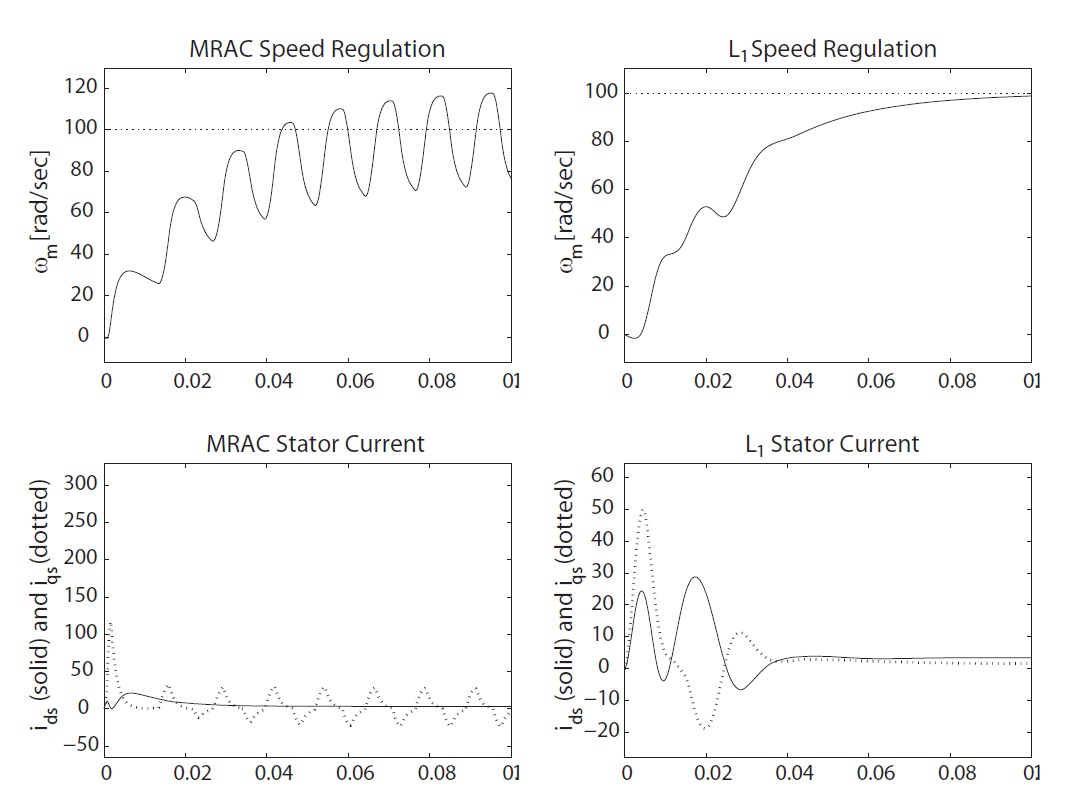
Figure 35: Adaptive control performance with unmodeled dynamics.
This research studies adaptive control methods for controlling an induction motor with parameter uncertainty. For instance, rotor resistance changes with temperature, and the inductances are affected by saturation in the machine. Two types of adaptive control are proposed. First, a model reference adaptive controller (MRAC) is developed. It attempts to tune itself, causing the machine to track a desired reference behavior. However, this controller is shown to lack robustness in the presence of unmodeled dynamics, especially when the tuning rate is fast. An L1 adaptive controller is developed to address this issue. The L1 controller uses a low-pass filter to ensure that the stator current input is smooth. Thus, control effort is not expended correcting very fast high frequency dynamics, even with very fast adaptive tuning. This results in a much more robust controller.
Figure 35 shows the simulated response of both the MRAC controller and the L1 controller when extra unmodeled dynamics are entered into the system. Both systems use a direct field-oriented control strategy with separate adaptive control loops to regulate speed, direct axis flux, and quadrature axis flux. Notice that with the addition of unmodeled dynamics, the MRAC controller has very high frequency oscillations in the control channel, which leads to a lack of robustness. The L1 controller maintains smooth stator currents, so the system is much more robust. This allows the user to increase the tuning rates arbitrarily high in order to safely increase performance.
This research is supported by the Grainger Center for Electric Machinery and Electromechanics.