Primary and Secondary Control of Dispatchable Virtual Oscillator-Controlled Grid-Forming Inverters
T.G. Roberts with adviser A. Domínguez-García
Grid Forming Inverters (GFMs) are a promising technology for replacing synchronous generators to sustain system voltage and frequency in microgrids with low inertia. In the U.S. bulk power grid, inertia from rotating generators helps resist sudden changes or fluctuations in frequency. Current Grid Following Inverters (GFLs) do not possess the capability to regulate their own frequency or voltage, which can lead to grid instability on grids with a high percentage of renewables. GFMs however are able to regulate their own voltage and frequency output. Applications of GFMs range from replacing synchronous machines to creating fully renewable microgrids. This research focuses on primary and secondary control of dispatchable virtual oscillator controlled (dVOC) Grid Forming Inverters. We first develop a power-flow model for a three bus microgrid with a dVOC-based inverter at each bus. Afterwards, we create a reduced-order dynamical model with a distributed slack bus. We then propose a secondary control architecture for regulating frequency and voltage using multiple integral controllers. This approach is novel, as previously only frequency and voltage control for droop-based GFMs has been extensively developed. Examining secondary frequency and voltage control for dVOC-based inverters is an important step in broadening the field of GFM control and implementation in microgrids, as the percentage of renewables on the grid rises.
To test this control scheme, we first define a three-phase microgrid composed fully of dVOC-based resources, where one resource is a load and two are generation sources. This test system allows us to determine the feasibility and dynamics of a fully GFM-based microgrid in context with our control scheme. To find the initial conditions for our dynamic simulation test of primary control, we employ power flow analysis on our system, using a modified version of the distributed slack bus Newton Raphson (NR) algorithm used for synchronous generator-based systems. Then, once the model is formulated, we simulate the open-loop behavior of the microgrid to determine how further control strategies will be beneficial. We determine from these tests that primary control for our GFM-based system does indeed stabilize frequency and voltage in the face of disturbances. However, similarly to primary control for the synchronous generation case, frequency and voltage values are no longer at their nominal value. Following from there, we develop a secondary control closed-loop model for our three bus microgrid to test the effectiveness of our control scheme for returning frequency and voltage to their nominal value. We use a distributed integral control-based approach, where each generation bus is equipped with both a frequency and voltage controller. The results of this simulation determined that our control scheme was able to return voltage and frequency values back to nominal after load changes in the system, as seen in Figure 1. The control scheme focused on a fully inverter-based microgrid and offers proof of concept for a simultaneous secondary control scheme for both voltage and frequency. Furthermore, it paves the way for future work on distributed secondary control practices for microgrids. This research is funded by the U.S. Department of Energy.
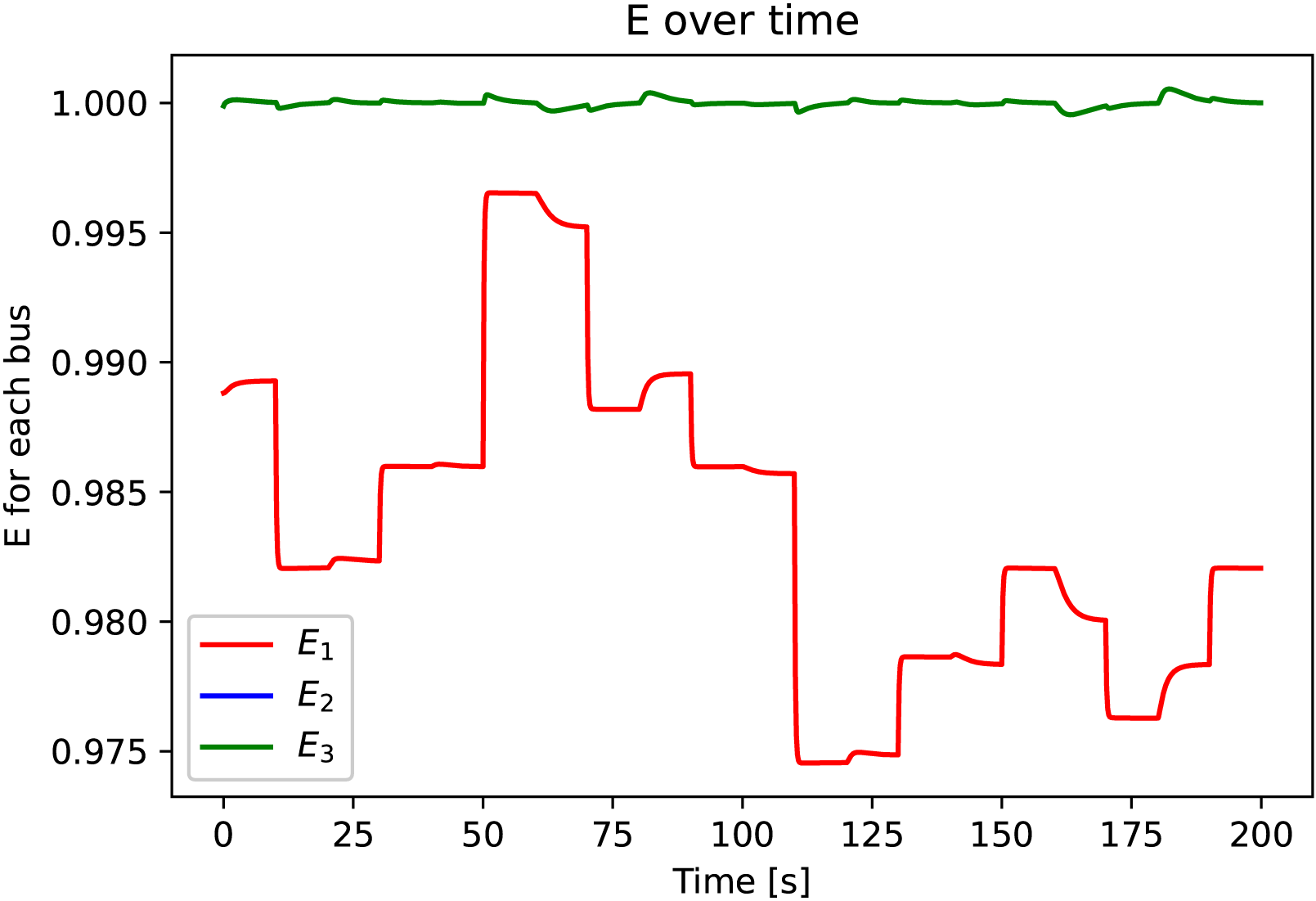
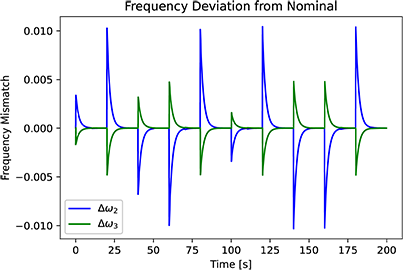
Figure 1: (Upper) Voltage-angle dynamics when the system is disturbed, Controlled voltage, depicted in blue and green (overlapping), remain near 1.0 p.u., whereas uncontrolled voltage, depicted in red, dips as low as 0.975 p.u.
(Lower) Resulting frequency-mismatch when the system is disturbed. Through secondary frequency control, this error is always driven to zero before the next load-change occurs