Hardware in Loop (HIL) Implementation of a Centralized and a Distributed Frequency Regulation Architecture for Islanded Inertia-Less AC Microgrids
Siddhartha Nigam with advisor P.Sauer and A. Dominguez-Garcia
Any collection of interconnected generators and loads capable of islanded operation is generally considered a microgrid. It follows, then, that there are no formal restrictions on generator type in a microgrid; however, like the prototypical example of a neighborhood comprising homes with rooftop-mounted photovoltaic arrays, microgrids are typically envisaged to consist entirely of generators interfaced through power electronics. Consequently, without the spinning mass inherent in traditional synchronous generators, this class of microgrid has little to no effective inertia, thus making frequency regulation one of the key operational challenges. In this work, we describe the implementation and testing of a centralized and a distributed frequency-regulation controller for islanded inertia-less ac microgrids. We use a simple six-node network, as shown in Figure 8, to describe the islanded inertia-less ac microgrid with three inverter-based generators as well as loads.
For the centralized frequency-regulation architecture, we use the NI cRIO-9068 microcontroller (back cover) as the centralized controller to regulate the frequency of the inertia-less ac microgrid. We model the microgrid using the Typhoon HIL, which emulates the real-time microgrid operations. The centralized controller monitors the ac microgrid to detect and compute the average frequency error in the microgrid due to load changes. The controller then fixes the set points of the inverter-based generator sources to remove the average frequency error. This process takes place continuously in a closed loop regulating the microgrid frequency. For the distributed frequency-regulation architecture, we use six Arduino based microcontrollers (front cover) to run a ratio consensus algorithm to compute, in a distributed fashion, the average frequency error in the system due to load changes.
Based on the consensus results that provide the average frequency error, the frequency controllers of each inverter-based generation resource fix the set points to match the generation and load and thus regulate the system frequency. We implement each frequency controller on the Arduinos, in addition to their ability to run the ratio consensus algorithms, and model the microgrid in the Typhoon HIL, similar to what we have for the centralized architecture. The communication between the Typhoon and the NI cRIO-9068 or the six Arduino-based microcontrollers for centralized and distributed architectures is carried out via the Modbus protocol with the Typhoon acting as the slave device and the controllers as the master. We describe results for frequency regulation, including the individual change in the set points of the inverter-based generators with respect to the load changes in the system, and the associated bus, the average frequency error, and its correction over time (see Figure 9). This research is funded by Domínguez-García Cost-Share-Grant AC281.
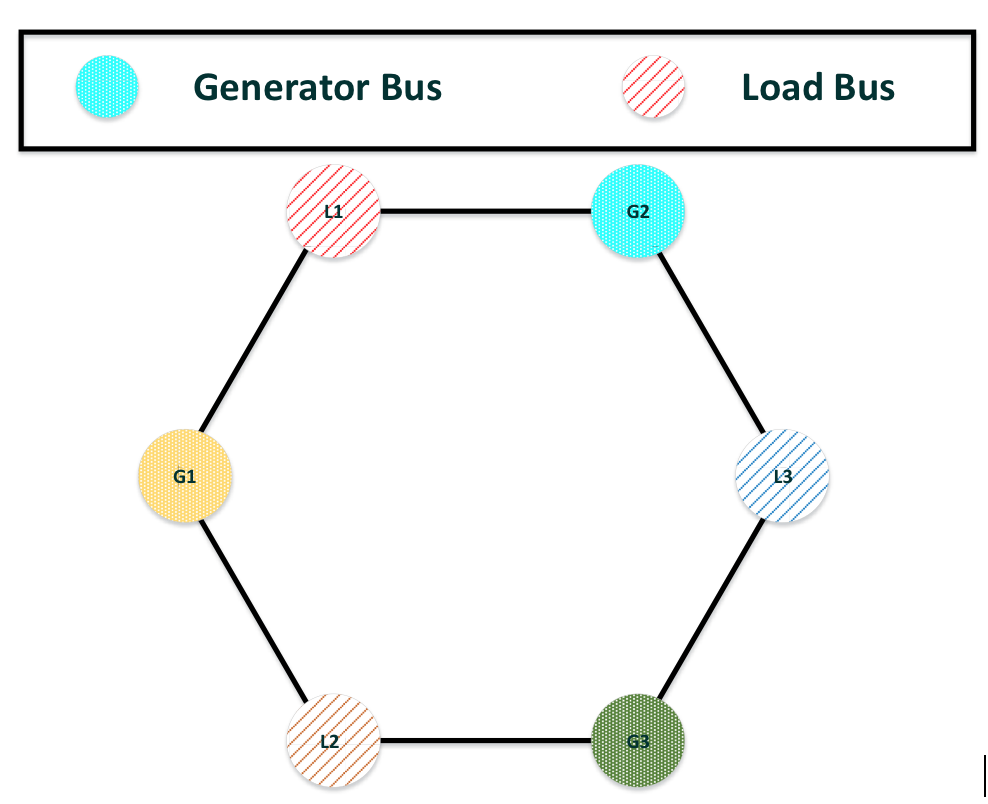
Figure 8: six-node AC microgrid
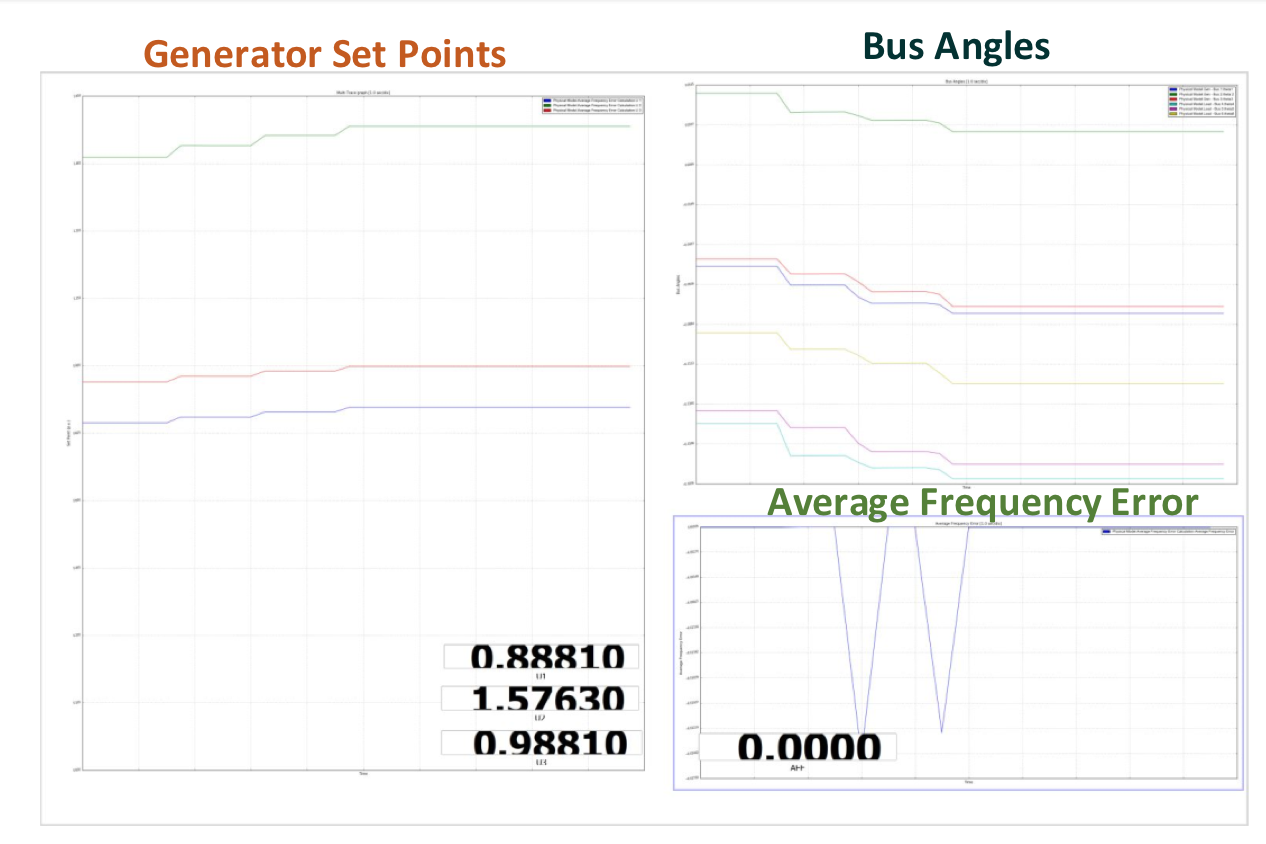
Figure 9: generator set points, bus angles and average frequency error on load changes