Distributed Algorithms for Voltage Control in Distribution Networks
Brett Robbins with adviser A. Domínguez-García
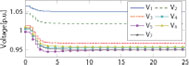
Figure 29: Controlled voltage responses.
Driven by the US DOE Smart Grid initiative, and its European counterpart Electricity Networks of the Future, electric power distribution systems will undergo radical transformations in structure and functionality. These transformations are enabled by the integration of (i) advanced communication and control, (ii) renewable-based variable generation resources, e.g., photovoltaics, and (iii) new storage-capable loads, e.g., plug-in hybrid electric vehicles. Our proposed two-stage architecture controls bus voltages in distribution networks though reactive power injections provided by distributed energy resources (DERs). A local controller on each network bus monitors the bus voltage, and whenever there is a voltage violation, it uses locally available information to estimate the amount of reactive power that needs to be injected into, or absorbed at, the bus in order to correct the violation. If the DERs connected to the bus can collectively provide the reactive power estimated by the local controller, they are instructed to do so. Otherwise, the local controller initiates a request for additional reactive power injections from other controllers at neighboring buses through a distributed algorithm that relies on the local exchange of information (between neighboring local controllers). It is shown that the proposed architecture, although not necessarily optimal, helps prevent voltage violations and shape the voltage profile in radial distribution networks, even in the presence of a considerable penetration of variable generation and loads.
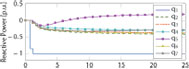
Figure 30: Reactive power support.
The feeder voltage of an 8-bus distribution network with constant load is set to 1.08 p.u. to induce an over-voltage of 1.0642 p.u. on bus 1. Figure 29 shows the controlled system response after the two-stage control strategy is implemented; and Figure 30 shows the constrained reactive power support provided at each bus. Initially, the actions of the controllers cause an under-voltage at buses 5 and 7, but this is quickly corrected and all of the buses operate within 5% of 1 p.u. after approximately 15 s. This research is supported by the Consortium for Electric Reliability Technology Solutions: DOE Sub ASU 09-208.
This research is funded by the Grainger Center for Electric Machinery and Electromechanics.