An Active-Power Load-Sharing Controller for Frequency Regulation in Inverter-Based Microgrids
Madi Zholbaryssov with adviser A. Domínguez-García
We propose a distributed frequency controller for lossy microgrids which combines the functions of the conventional primary droop and secondary controllers. One of its important features is that it enforces the absolute value of the voltage phase-angle differences over each electrical line to be less than some fixed value; with a slight abuse of terminology, this property is referred to as the phase-cohesiveness property for lossy microgrids. Having such a property ensures a global tracking of the active power references for each inverter-interfaced generator. Several schemes are introduced at different time scales to maintain the phase-cohesiveness property. One scheme, at the fastest time scale, is based on the slow readjustment of the reference before it reaches the actual desired state. Another scheme, at a slower time scale, is based on utilizing controllable loads in a distributive way by solving an optimal power flow-type optimization problem.
Consider a 9-bus microgrid, with a topology shown in Figure 35.
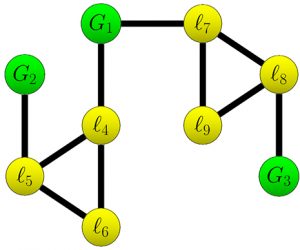
Figure 35: 9-bus lossless microgrid
Nodes G1, G2, and G3 correspond to inverters, with the remaining nodes corresponding to loads. Figure 36 shows the performance of the proposed control strategy for large load perturbations at t = 0.6 s, 4.6 s, and 8.6 s. After each load perturbation, we are able to achieve the desired active power load sharing and regulate the frequency ω1/2π, i = 1,2,3 at each inverter to the desired frequency value of 60 Hz. This research is supported by the U.S. Department of Energy.
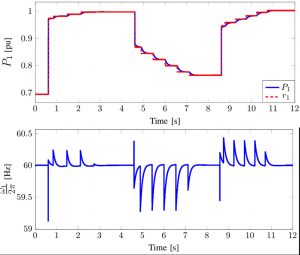
Figure 36: Convergence of P1 to r1 and ω1 /2ω to 60 Hz