Advantages and Opportunities of Highly Parallelized Electric Machines
Matthew Magill with Adviser P. T. Krein

Figure 1: (a) Total air-gap MMF waveform
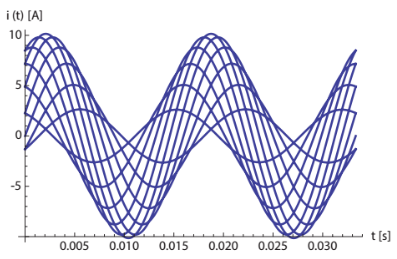
Figure 1: (b) Coil currents for a tooth-wound 12-phase machine operated to match perfromance of a four-pole, three-phase machine
Increasing the number of independent machine excitations provides increased operational flexibility. Figure 1(a) shows the air-gap magnetomotive force (MMF) waveform for a conventional concentric-wound, four-pole, 24-slot machine fed with a balanced three-phase excitation. If, however, the machine were to be rewound with 24 tooth-wound coils with 12 independent single-phase inverters, the exact MMF waveform in Fig. 1(a) could be formed if the currents of Fig. 1(b) were developed. In addition to this example, the use of multiple independent machine excitations can be used to enable electronically controlled pole-changing, active damping, and improved fault-tolerant operation.
This research is supported by the Grainger Center for Electric Machinery and Electromechanics.