A Distributed Spring-Aided Vertical Electromechanical Spine for Bio-Inspired Robots
MS student Bonhyun Ku with advisor A. Banerjee
Biological mechanisms are incorporated in mobile robots to interact with their environments. Although existing biologically inspired robots perform well, their performance is limited by the lack of a spine. A vertebrate spine provides agility, a wide range of motion, balance, and efficiency. Often the robot design involves adapting a conventional motor with gears, linkages, and joints to execute high-level motion planning. Creating a spine with geared motors leads to complex mechanical designs, low actuation speed, poor backdrivability, and backlash issues.
This research project introduces an approach for creating a spring-aided electromechanical actuator for a robot spine that trades off allowable displacement for torque. Six modules are stacked in series to form a spine. Each module has an E-shaped core, two coils, and embedded power electronics. The proposed actuator utilizes electromagnetic force induced by the coil currents. To enhance torque capability when the air gap is large, a torsion spring mechanism is applied on each module. Elastic energy stored in the springs is used to improve torque. The stacked-actuator structure allows the system to share magnetic flux paths. This configuration simplifies mechanical design and assembly while improving thermal management. It also enables a distributed actuation mechanism suitable for creating limited-displacement motions, as in an animal spine. Experiments with the spring-aided vertical spine validate its ability to reproduce animal-like motions. This research is supported by the National Science Foundation and Kwanjeong Educational Foundation.
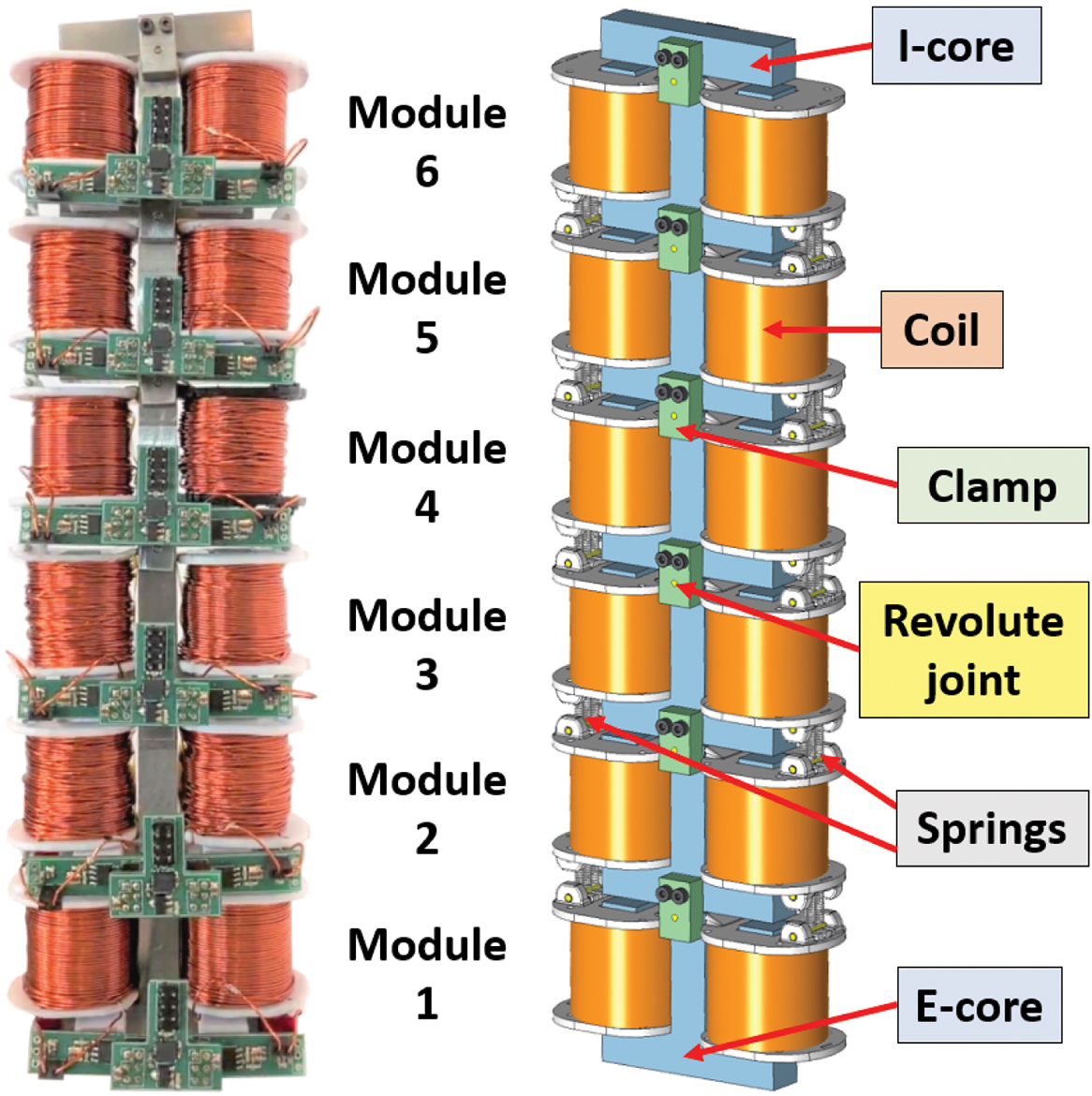
Figure 1: 6-link electromechanical spine