High Torque Density Cycloid Electric Machines for Robotic Applications
CEME Collaborator Julia Zhang – Oregon State University
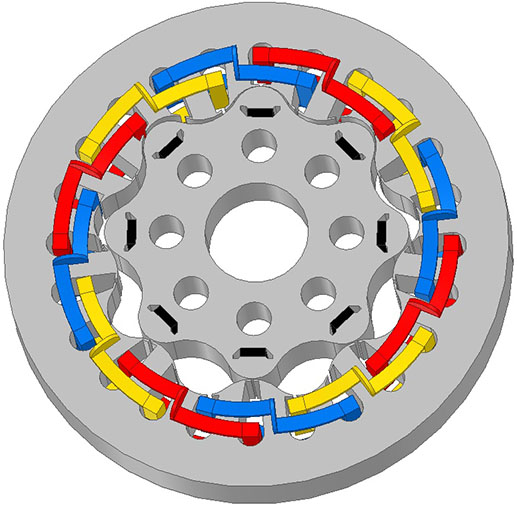
Figure 1: An 8-pole 9/8 structure cycloid electric machine: 9 lobes on stator, 8 lobes on rotor, input/output torque ratio 8/1
Typical human-sized legged locomotion needs an output torque of around 300 Nm to accomplish motions such as walking and running. A direct-drive design using only one high-torque electric machine cannot meet these size and weight requirements. General practice uses a low-torque electric machine (about 10 to 15 Nm) coupled with a transmission high-gear reduction ratio (20:1 or even higher. Usually, multi-stage gearboxes are needed due to the high gear ratio) to boost the output torque. This research proposes a novel legged-locomotion actuator device — a cycloid electric machine that integrates an ac electric machine stator and a cycloid gear — to significantly reduce size and weight of the legged-locomotion actuation system.
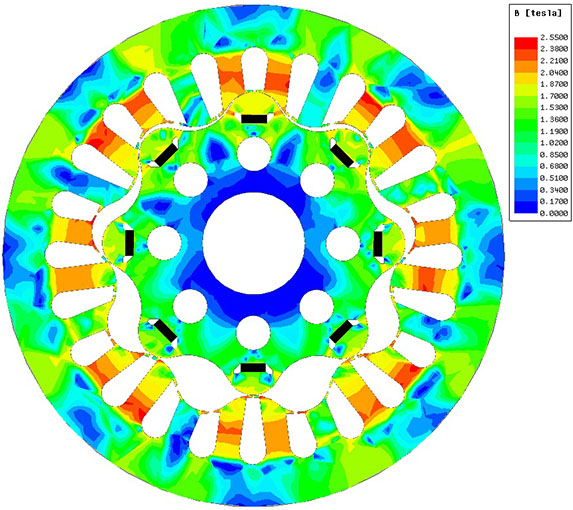
Figure 2: Flux density plot of the 9/8 structure cycloid electric machine
Figure 1 shows an 8-pole 9/8 structure cycloid electric machine. The stator contains nine ring lobes (N s = 9), Lobes on the cycloid rotor, N r, are equal to the number of stator lobes minus one, N r = N s-1. The cycloid rotor reciprocation causes indexing. The rotating magnetic field produced by the stator winding drives the cycloid rotor to roll and index. The output shaft (connected to eight output pins) rotates one revolution for every eight revolutions of the eccentric input shaft. Therefore, the gear ratio is 8:1. Permanent magnets are added to the cycloid rotor to further enhance torque density. Torque on the output shaft is N r times the torque on the cycloid rotor. The output shaft will be connected to the robot leg with large torque capability. Figure 2 shows the flux density plot of the cycloid electric machine. This project is funded by the Grainger Center for Electric Machinery and Electromechanics.